客服热线:
客服热线:威斯康星大学麦迪逊分校的研究人员通过使用一种方法演示了非视距(NLOS)成像,该方法使用相同的数学方法来解释用传统线条拍摄的图像 - 视觉(LOS)成像系统。该新方法通过将NLOS成像问题重新构造为波衍射问题,然后使用来自其他成像系统众所周知的数学变换来解释光波并从隐藏场景重建图像,解决了对隐藏场景成像的挑战。“我们所做的是使用波表达问题,”Andreas Velten教授说。

威斯康星大学麦迪逊分校正在开展一个项目,旨在利用反射激光创建非视距图像。
研究人员介绍了一种称为相量场的虚拟波场。该相量场虚拟波成像框架允许团队应用现有的LOS波成像技术从NLOS数据中获取图像、视频和其他信息。通过应用在传统LOS成像系统中模拟波传播的数学运算符,从原始飞行时间数据成像NLOS场景。
为了展示他们的技术,研究人员创建了三种成像算法,模仿三种不同的LOS系统:虚拟摄影相机,可以捕捉场景的2D图像,而无需了解照明光源;瞬态相机,可以创建通过场景的光传输视频;和时间门控共聚焦相机,可以创建一个强大的3D场景重建。
该团队利用其技术在隐藏的场景中创建了一个光传输视频,可以实现四到五次光的可视化,根据Velden的说法,它可以成为摄像机看到多个角落的基础。
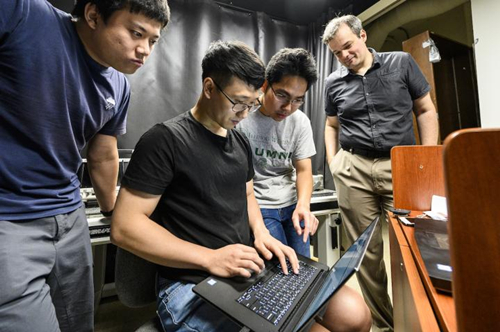
UW(华盛顿大学)研究生(左起)Xiaochun Liu,Ji-Hyun Nam和Toan Le与助理教授兼首席研究员Andreas Velten在威斯康星大学麦迪逊分校医学科学楼内的计算光学实验室一起工作。
该研究团队表明,尽管存在场景复杂,反射器材料差异、散射环境光以及构成场景物体的不同景深等问题,该技术也可以对隐藏的场景进行成像。该技术一旦完善,威斯康星团队的技术可得到广泛的应用,从防御和救灾到制造和医学成像。例如,在机器人手术中,由Velten团队开发的技术可以更全面地了解敏感程序周围发生的情况。Velten说,这项技术成本低廉,结构紧凑。如果可以使用传感器阵列来捕获从隐藏场景反射的光,则可以进一步改进该技术。对于目前的实验,该团队只使用了一个探测器。