客服热线:
客服热线:近日,来自美国圣母大学和加州大学河滨分校的研究人员研发了一个光驱动的小型柔性"机器人,将其建造在水面上可利用其随水面的划动提供电力,用于照明。(doi: 10.1126/scirobotics.abi4523)。
该柔性机器人由含有金属纳米棒的,并可重复使用的水凝胶薄膜组成,它能将入射光线转化为热量,从而将凝胶内的水变成充满蒸汽的气泡。这些气泡使凝胶结构在水面上振荡并推动其本身运动,就像海面上划动的桨。这种柔性机器人的运动是基于仿生结构的,研究人员希望有一天它能够吸收海中泄漏的石油或其他污染物。
许多研究人员试图用柔性材料而不是传统的刚性金属或塑料骨架来制造机器人。不过,这些柔性机器人大多需要外部动力输入,或者它们对来自热量或化学反应的驱动力响应迟缓。
在本研究中,加州大学河滨分校化学家Zhiwei Li的团队从浮游生物,如水黾,得到了水凝胶机器人的思路。浮游生物能够适应水面的表面张力并在水上行走。该团队设计的微型机器人Neusbot包含一个注入了氧化铁和铜纳米棒的多孔聚合物水凝胶。这些材料通过表面质子共振,能迅速将白光转化为热量。李和他的同事将这种水凝胶夹在另外两种具有不同热膨胀系数的疏水性聚合物材料之间。
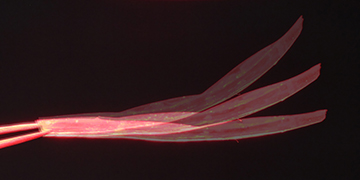
Neusbot的弯曲过程
水凝胶吸收水分,而其上下两层则具有强疏水性使设备漂浮起来。在外界光辐照下,纳米棒被加热,装置内的水变成了蒸汽气泡。这些气泡打破了薄膜的平衡状态,驱动其产生有规律的振荡。当水蒸气从水凝胶中逸出时,它吸收了更多的液态水,再次转化为蒸汽。在低强度近红外激光的照射下,几毫米长的Neusbots以每分钟约四个 "体长 "的速度运动。研究人员发现,他们可以通过控制激光照射的时间来控制Neusbots的方向。
下一步,该研究团队将升级此机器人的功能,即加入一个可以吸收油或其他化学品的第四层材料。研究人员认为无论是简单地跟随太阳的轨迹,还是通过一个额外的光源进行控制,Neusbots可以沿着被污染的水面巡航,从而吸走石油或化学品。