客服热线:
客服热线: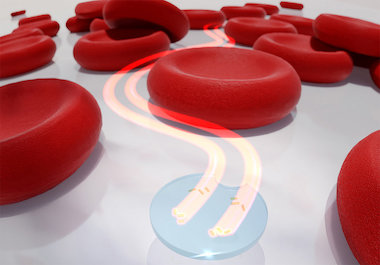
微型无人机运动的示意图。
在此项目中,维尔茨堡的研究人员受到了普通四轴飞行器的启发。四轴飞行器中四个独立的转子可以完全控制其运动。这种多自由度的控制为操控纳米级和微米级的物体提供有力的保障,例如纳米结构的组装、纳米级精度的表面分析,以及一些生物医学领域的应用。
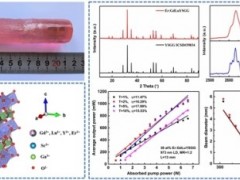
具体地,研究人员在结构上组装了等离子纳米天线,每个天线都能将驱动光的圆偏振分量共振散射到明确的方向。经过设计,每个纳米天线的定向散射可以驱动整个设备在特定方向上运动。Würzburg 的研究人员制备了由直径为 2.5 微米的透明聚合物圆盘组成的微型无人机,四个由独立的纳米电机嵌入该圆盘中。在使用中,各电机是通过调整光功率来操控的,即调整不同波长光的圆偏振分量的功率。驱动此微型无人机的原理类似于宏观的多旋翼无人机。
抵消布朗运动
另外,建立在团队之前对金属结构研究的基础上,研究人员专门针对天线如何接收圆偏振光进行了优化,实现了一种无论无人机的方向如何都能让电机接收光的设计。
接收到的光能由电机以特定方向发射以产生光学反冲力,方向取决于光偏振的旋转方向,及顺时针或逆时针偏振。制造微型无人机的过程还涉及使用加速氦离子从单晶金上切割纳米结构,该技术以及使用电子束光刻生产无人机主体。
在实验中,该微型设备可以成功地接收外界光调控,沿着复杂的路径运动。由于所有自由度都可以独立和直接地受到控制,因此使用反馈控制回路可用于抵消布朗运动并使设备保持在既定轨道上。
接下来,研究团队计划设计一个反馈回路,实现自动地纠正外部环境对微型无人机运动的影响,以从而精确地控制运动轨迹,并实现进一步的控制,包括在无人机表面上方的高度方向。另一个计划是将更多功能的微型工具附加到微型无人机上,从而在人类血液系统中实现更多生物技术提供导航保障。