客服热线:
客服热线:越来越多的医生使用外科激光来切割、清创和烧灼组织。当激光与另一种主要的医学趋势——微创手术相结合时,手术团队需要通过一个小切口来操纵激光。
一种新型激光导向机电微型机器人可以使内窥镜手术更容易和更精确。这种微型设备,只有6毫米× 11毫米大小,适合现有的内窥镜手术设备,并通过光纤连接提供辐射。
面临的挑战
以前试图控制激光末端的微创手术工具分为两大类:光纤转向和光学转向。在前者中,磁铁和电磁线圈(有时是电缆或推挽杆)在物理上弯曲光纤的尖端;后一种方法是利用镜子或棱镜来引导从光纤末端射出的激光束。这两种方法都有各自的缺点,第一种是速度和运动范围受限,第二种是缺乏微型化。
为了克服这些挑战,由美国哈佛大学的研究人员设计了一个激光转向系统,该系统包含压电弯曲驱动器和三个微型旋转镜。激光束通过光纤进入微型机器人,通过一个梯度折射率准直透镜使激光束变窄并对齐。在设计该装置时,该团队假设光束在这一点上的宽度为1毫米。一个微型的平凸透镜将光聚焦,一个固定的反射镜将光以90度角反射。光路中的下一个可控制的反射镜将光束引导到手术部位。
激光加工、模块化装配
为了制造这种设备,哈佛大学的研究人员将现成的部件与他们用激光微加工工具制造的定制设计的组件结合起来。为了将部件组装在一起,该团队需要开发一种新的模块化组装技术,以简化设备未来版本的组装过程。
研究人员们只用一个低功率的红色激光笔演示了他们的概念验证微型机器人。他们称其为“我们研究的一个重要局限性”,并补充说,该团队目前正致力于将激光转向技术与现代外科手术中使用的高功率激光(通常是二氧化碳激光)相结合。
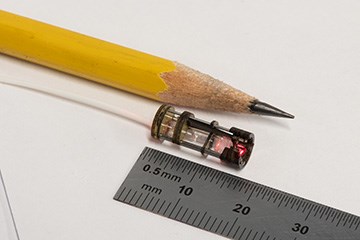
图:微型机器人激光转向末端执行器与铅笔的尺寸比较。